Run this tutorial
Click here to run this tutorial on binder:Tutorial: Model order reduction for PDE-constrained optimization problems¶
A typical application of model order reduction for PDEs are PDE-constrained parameter optimization problems. These problems aim to find a local minimizer of an objective functional depending on an underlying PDE which has to be solved for all evaluations. A prototypical example of a PDE-constrained optimization problem can be defined in the following way. For a physical domain \(\Omega \subset \mathbb{R}^d\) and a parameter set \(\mathcal{P} \subset \mathbb{R}^P\), we want to find a solution of the minimization problem
where \(u_{\mu} \in V := H^1_0(\Omega)\) is the solution of
The equation \(\eqref{eq:primal}\) is called the primal equation and can be arbitrarily complex. MOR methods in the context of PDE-constrained optimization problems thus aim to find a surrogate model of \(\eqref{eq:primal}\) to reduce the computational costs of an evaluation of \(J(u_{\mu}, \mu)\).
If there exists a unique solution \(u_{\mu}\) for all \(\mu \in \mathcal{P}\), we can rewrite (\(\textrm{P}\)) by using the so-called reduced objective functional \(\mathcal{J}(\mu):= J(u_{\mu}, \mu)\) leading to the equivalent problem: Find a solution of
There exist plenty of different methods to solve (\(\hat{P}\)) by using MOR methods. Some of them rely on an RB method with traditional offline/online splitting, which typically result in a very online efficient approach. Recent research also tackles overall efficiency by overcoming the expensive offline phase, which we will discuss further below.
In this tutorial, we use a simple linear scalar valued objective functional and an elliptic primal equation to compare different approaches that solve (\(\hat{P}\)).
An elliptic model problem with a linear objective functional¶
We consider a domain \(\Omega:= [-1, 1]^2\), a parameter set \(\mathcal{P} := [0,\pi]^2\) and the elliptic equation
with data functions
The diffusion is thus given as the linear combination of scaled
indicator functions where \(\omega\) is defined by two blocks in the
left half of the domain, roughly where the w is here:
+-----------+
| |
| w |
| |
| w |
| |
+-----------+
From the definition above we can easily deduce the bilinear form \(a_{\mu}\) and the linear functional \(f_{\mu}\) for the primal equation. Moreover, we consider the linear objective functional
where \(\theta_{\mathcal{J}}(\mu) := 1 + \frac{1}{5}(\mu_0 + \mu_1)\).
With this data, we can construct a StationaryProblem in pyMOR.
from pymor.basic import *
import numpy as np
domain = RectDomain(([-1,-1], [1,1]))
indicator_domain = ExpressionFunction(
'(-2/3. <= x[0]) * (x[0] <= -1/3.) * (-2/3. <= x[1]) * (x[1] <= -1/3.) * 1. \
+ (-2/3. <= x[0]) * (x[0] <= -1/3.) * (1/3. <= x[1]) * (x[1] <= 2/3.) * 1.',
dim_domain=2)
rest_of_domain = ConstantFunction(1, 2) - indicator_domain
l = ExpressionFunction('0.5*pi*pi*cos(0.5*pi*x[0])*cos(0.5*pi*x[1])', dim_domain=2)
parameters = {'diffusion': 2}
thetas = [ExpressionParameterFunctional('1.1 + sin(diffusion[0])*diffusion[1]', parameters,
derivative_expressions={'diffusion': ['cos(diffusion[0])*diffusion[1]',
'sin(diffusion[0])']}),
ExpressionParameterFunctional('1.1 + sin(diffusion[1])', parameters,
derivative_expressions={'diffusion': ['0',
'cos(diffusion[1])']}),
]
diffusion = LincombFunction([rest_of_domain, indicator_domain], thetas)
theta_J = ExpressionParameterFunctional('1 + 1/5 * diffusion[0] + 1/5 * diffusion[1]', parameters,
derivative_expressions={'diffusion': ['1/5','1/5']})
problem = StationaryProblem(domain, l, diffusion, outputs=[('l2', l * theta_J)])
We now use pyMOR’s builtin discretization toolkit (see Tutorial: Using pyMOR’s discretization toolkit)
to construct a full order StationaryModel. Since we intend to use a fixed
energy norm
we also define \(\bar{\mu}\), which we pass via the argument
mu_energy_product. Also, we define the parameter space
\(\mathcal{P}\) on which we want to optimize.
mu_bar = problem.parameters.parse([np.pi/2,np.pi/2])
fom, data = discretize_stationary_cg(problem, diameter=1/50, mu_energy_product=mu_bar)
parameter_space = fom.parameters.space(0, np.pi)
We now define the first function for the output of the model that will be used by the minimizer.
def fom_objective_functional(mu):
return fom.output(mu)[0, 0]
We also pick a starting parameter for the optimization method, which in our case is \(\mu^0 = (0.25, 0.5)\).
initial_guess = [0.25, 0.5]
Next, we visualize the diffusion function \(\lambda_\mu\) by using
InterpolationOperator for interpolating it on the grid.
from pymor.discretizers.builtin.cg import InterpolationOperator
diff = InterpolationOperator(data['grid'], problem.diffusion).as_vector(fom.parameters.parse(initial_guess))
fom.visualize(diff)
print(data['grid'])
Tria-Grid on domain [-1,1] x [-1,1]
x0-intervals: 100, x1-intervals: 100
elements: 40000, edges: 60200, vertices: 20201
We can see that our FOM model has 20201 DoFs which just about suffices to resolve the data structure in the diffusion. This suggests to use an even finer mesh. However, for enabling a faster runtime for this tutorial, we stick with this mesh and remark that refining the mesh does not change the interpretation of the methods that are discussed below. It rather further improves the speedups achieved by model reduction.
Before we discuss the first optimization method, we define helpful functions for visualizations.
import matplotlib as mpl
mpl.rcParams['figure.figsize'] = (12.0, 8.0)
mpl.rcParams['font.size'] = 12
mpl.rcParams['savefig.dpi'] = 300
mpl.rcParams['figure.subplot.bottom'] = .1
mpl.rcParams['axes.facecolor'] = (0.0, 0.0, 0.0, 0.0)
from mpl_toolkits.mplot3d import Axes3D # required for 3d plots
from matplotlib import cm # required for colors
import matplotlib.pyplot as plt
from time import perf_counter
def compute_value_matrix(f, x, y):
f_of_x = np.zeros((len(x), len(y)))
for ii in range(len(x)):
for jj in range(len(y)):
f_of_x[ii][jj] = f((x[ii], y[jj]))
x, y = np.meshgrid(x, y)
return x, y, f_of_x
def plot_3d_surface(f, x, y, alpha=1):
X, Y = x, y
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
x, y, f_of_x = compute_value_matrix(f, x, y)
ax.plot_surface(x, y, f_of_x, cmap='Blues',
linewidth=0, antialiased=False, alpha=alpha)
ax.view_init(elev=27.7597402597, azim=-39.6370967742)
ax.set_xlim3d([-0.10457963, 3.2961723])
ax.set_ylim3d([-0.10457963, 3.29617229])
return ax
def addplot_xy_point_as_bar(ax, x, y, color='orange', z_range=None):
ax.plot([y, y], [x, x], z_range if z_range else ax.get_zlim(), color)
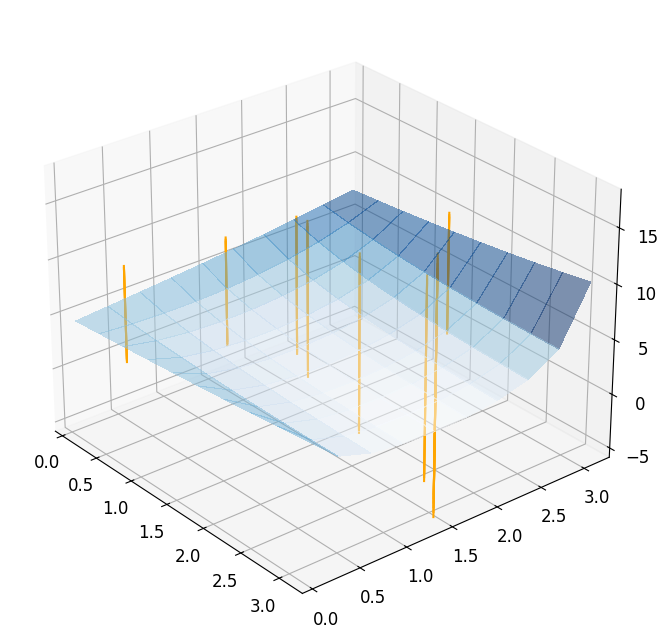
Now, we can visualize the objective functional on the parameter space
ranges = parameter_space.ranges['diffusion']
XX = np.linspace(ranges[0] + 0.05, ranges[1], 10)
plot_3d_surface(fom_objective_functional, XX, XX)
<Axes3D: >

Taking a closer look at the functional, we see that it is at least locally convex with a locally unique minimum. In general, however, PDE-constrained optimization problems are not convex. In our case changing the parameter functional \(\theta_{\mathcal{J}}\) can already result in a very different non-convex output functional.
In order to record some data during the optimization, we also define helpful functions for recording and reporting the results in this tutorial.
def prepare_data(offline_time=False, enrichments=False):
data = {'num_evals': 0, 'evaluations' : [], 'evaluation_points': [], 'time': np.inf}
if offline_time:
data['offline_time'] = offline_time
if enrichments:
data['enrichments'] = 0
return data
def record_results(function, data, adaptive_enrichment=False, opt_dict=None, mu=None):
if adaptive_enrichment:
# this is for the adaptive case! rom is shipped via the opt_dict argument.
assert opt_dict is not None
QoI, data, rom = function(mu, data, opt_dict)
opt_dict['opt_rom'] = rom
else:
QoI = function(mu)
data['num_evals'] += 1
data['evaluation_points'].append(mu)
data['evaluations'].append(QoI)
return QoI
def report(result, data, reference_mu=None):
if (result.status != 0):
print('\n failed!')
else:
print('\n succeeded!')
print(f' mu_min: {fom.parameters.parse(result.x)}')
print(f' J(mu_min): {result.fun}')
if reference_mu is not None:
print(f' absolute error w.r.t. reference solution: {np.linalg.norm(result.x-reference_mu):.2e}')
print(f' num iterations: {result.nit}')
print(f' num function calls: {data["num_evals"]}')
print(f' time: {data["time"]:.5f} seconds')
if 'offline_time' in data:
print(f' offline time: {data["offline_time"]:.5f} seconds')
if 'enrichments' in data:
print(f' model enrichments: {data["enrichments"]}')
print('')
Optimizing with the FOM using finite differences¶
There exist plenty optimization methods, and this tutorial is not meant
to discuss the design and implementation of optimization methods. We
simply use the minimize function
from scipy.optimize and use the
builtin L-BFGS-B routine which is a quasi-Newton method that can
also handle a constrained parameter space. For the whole tutorial, we define the
optimization function as follows.
from functools import partial
from scipy.optimize import minimize
def optimize(J, data, ranges, gradient=False, adaptive_enrichment=False, opt_dict=None):
tic = perf_counter()
result = minimize(partial(record_results, J, data, adaptive_enrichment, opt_dict),
initial_guess,
method='L-BFGS-B', jac=gradient,
bounds=(ranges, ranges),
options={'ftol': 1e-15, 'gtol': 5e-5})
data['time'] = perf_counter()-tic
return result
It is optional to give an expression for the gradient of the objective
functional to the minimize function.
In case no gradient is given, minimize
just approximates the gradient with finite differences.
This is not recommended because the gradient is inexact and the
computation of finite differences requires even more evaluations of the
primal equation. Here, we use this approach for a simple demonstration.
reference_minimization_data = prepare_data()
fom_result = optimize(fom_objective_functional, reference_minimization_data, ranges)
reference_mu = fom_result.x
report(fom_result, reference_minimization_data)
succeeded!
mu_min: {diffusion: [1.4246565699504339, 3.141592653589793]}
J(mu_min): 2.3917078761994834
num iterations: 7
num function calls: 27
time: 1.26024 seconds
Taking a look at the result, we see that the optimizer needs \(7\) iterations to converge, but actually needs \(27\) evaluations of the full order model. Obviously, this is related to the computation of the finite differences. We can visualize the optimization path by plotting the chosen points during the minimization.
reference_plot = plot_3d_surface(fom_objective_functional, XX, XX, alpha=0.5)
for mu in reference_minimization_data['evaluation_points']:
addplot_xy_point_as_bar(reference_plot, mu[0], mu[1])
Computing the gradient of the objective functional¶
A major issue of using finite differences for computing the gradient of the objective functional is the number of evaluations of the objective functional. In the FOM example from above we saw that many evaluations of the model were only due to the computation of the finite differences. If the problem is more complex and the mesh is finer, this can lead to a serious waste of computational time. Also from an optimizational point of view it is always better to compute the true gradient of the objective functional.
For computing the gradient of the linear objective functional \(\mathcal{J}(\mu)\), we can write for every direction \(i= 1, \dots, P\)
Thus, we need to compute the derivative of the solution \(u_{\mu}\) (also called sensitivity). For this, we need to solve another equation: Find \(d_{\mu_i} u_{\mu} \in V\), such that
where \(r_\mu^{\text{pr}}\) denotes the residual of the primal equation, i.e.
A major issue of this approach is that the computation of the full gradient requires \(P\) solutions of \(\eqref{sens}\). Especially for high dimensional parameter spaces, we can instead use an adjoint approach to reduce the computational cost to only one solution of an additional problem.
The adjoint approach relies on the Lagrangian of the objective functional
where \(p \in V\) is the adjoint variable. Deriving optimality conditions for \(\mathcal{L}\), we end up with the dual equation: Find \(p_{\mu} \in V\), such that
Note that in our case, we then have \(\mathcal{L}(u_{\mu}, \mu, p_{\mu}) = J(u, \mu)\) because the residual term \(r_\mu^{\text{pr}}(u_{\mu}, p_{\mu})\) vanishes since \(u_{\mu}\) solves \(\eqref{eq:primal}\) and \(p_{\mu}\) is in the test space \(V\). By using the solution of the dual problem, we can then derive the gradient of the objective functional by
We conclude that we only need to solve for \(u_{\mu}\) and \(p_{\mu}\) if we want to compute the gradient with the adjoint approach. For more information on this approach we refer to Section 1.6.2 in [HPUU08].
We now intend to use the gradient to speed up the optimization methods from above. All technical requirements are already available in pyMOR.
Optimizing using a gradient in FOM¶
We can easily include a function to compute the gradient to minimize
by using the output_d_mu method.
However, this method returns a dict w.r.t. the parameters.
In order to use the output for minimize we use the output’s
to_numpy method
to convert the values to a single NumPy array.
def fom_gradient_of_functional(mu):
return fom.output_d_mu(fom.parameters.parse(mu)).to_numpy()
opt_fom_minimization_data = prepare_data()
opt_fom_result = optimize(fom_objective_functional, opt_fom_minimization_data, ranges,
gradient=fom_gradient_of_functional)
# update the reference_mu because this is more accurate!
reference_mu = opt_fom_result.x
report(opt_fom_result, opt_fom_minimization_data)
succeeded!
mu_min: {diffusion: [1.4246556963614574, 3.141592653589793]}
J(mu_min): 2.3917078762140713
num iterations: 7
num function calls: 9
time: 1.28675 seconds
With respect to the FOM result with finite differences, we see that we have saved several evaluations of the function when using the gradient. Of course it is also not for free to compute the gradient, but since we are using the dual approach, this will only scale with a factor of 2. Furthermore, we can expect that the result above is more accurate which is why we choose it as the reference parameter.
Adaptive trust-region optimization using reduced basis methods¶
As a simple idea to circumvent the costly solutions of the FOM, one could build a reduced order model offline and use it online as a replacement for the FOM. However, in the context of PDE-constrained optimization, it is not meaningful to ignore the offline time required to build the RB surrogate since it can happen that FOM optimization methods would already converge before the surrogate model is even ready. Building a RB model that is accurate in the whole parameter space is thus usually too expensive. Thinking about this issue again, it is important to notice that we are solving an optimization problem which will eventually converge to a certain parameter. Thus, it only matters that the surrogate is good in this particular region as long as we are able to arrive at it. This gives hope that there must exist a more efficient way of using RB methods without trying to approximate the FOM across the whole parameter space.
To this end, we can use trust-region methods to adaptively enrich the ROM with respect to the underlying error estimator. In the trust-region method, we iteratively replace the global problem with local surrogates, compute local solutions to these surrogate problems, and enhance the surrogate models when we either are close to the boundary of the trust-region or when the model confidence decreases such that we require more data. The local surrogates are required to be accurate only locally, which avoids the construction of a globally accurate ROM. These local surrogates are built using FOM solutions and gradients. A speedup is obtained if many of the optimization steps based on FOM evaluations can be replaced by much cheaper iterations of the ROM and only a few FOM computations are required to build the reduced models.
The trust-region algorithm consists of one outer loop and many inner loops. The outer loop iterates over the global parameter space and constructs local trust-regions along with their corresponding surrogates, whereas the inner loops use a modified version of the projected BFGS algorithm to solve the local problems. For a fixed parameter in the outer iteration \(\mu\) and the current surrogate model \(J_r\), the local problems can be written as
In the formulation of (\(\hat{P}_r\)), \(\Delta \subseteq \mathcal{P}\) is the trust-region with tolerance \(\tau > 0\) for an error estimator \(e_r\) of our choice, in which the updated parameter \(\mu + s\) satisfies
In metric settings such as with the \(2\)-norm in parameter space, these trust-regions correspond to open balls of radius \(\tau\). However, using model reduction error estimators as in this tutorial, creates much more complex shapes. The sketch below shows an exemplary optimization path with inner and outer iterations and the respective trust-regions.
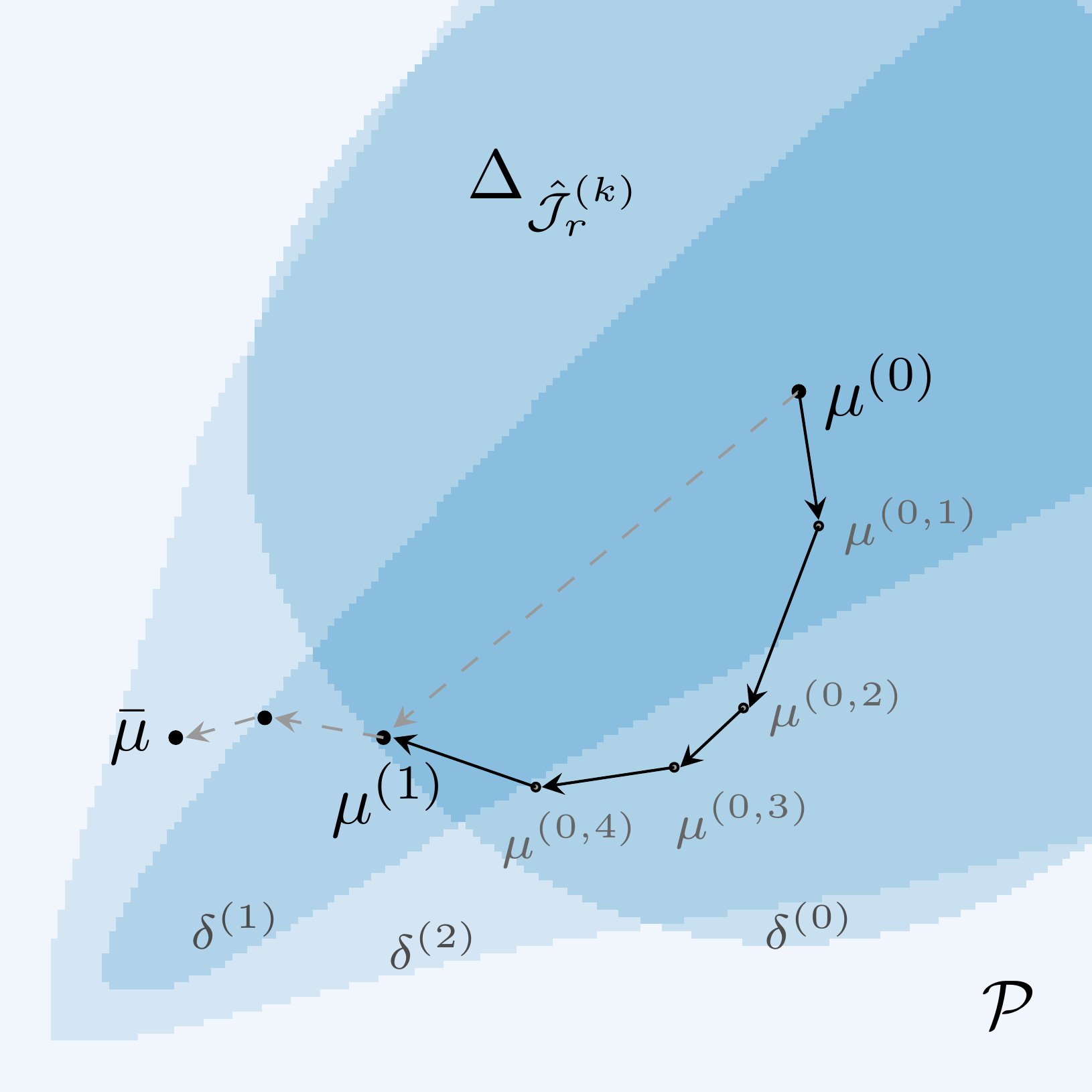
The adaptive component of this algorithm is the choice of the trust-radius and the enrichment. If a local optimization in an inner loop fails, we retry the surrogate problem with a smaller trust-region, thus limiting the trustworthiness of the current model. In contrast, when we quickly converge close to the boundary of the trust-region, it is a reasonable assumption that the globally optimal parameter is outside of the trust-region and, thus, we stop the inner iteration. After computing an inner solution we then have the option to keep the current surrogate model, enlarge the trust-radius of the local model or further enrich it by adding the FOM solution snapshot at the current local optimum. In this sense, the adaptive trust-region algorithm can reduce the number of FOM evaluations by estimating whether the current surrogate is trustworthy enough to increase the trust-radius and only enriching the model if the estimated quality is no longer sufficient.
The algorithm described above can be executed as follows.
from pymor.algorithms.tr import coercive_rb_trust_region
from pymor.parameters.functionals import MinThetaParameterFunctional
coercivity_estimator = MinThetaParameterFunctional(fom.operator.coefficients, mu_bar)
pdeopt_reductor = CoerciveRBReductor(
fom, product=fom.energy_product, coercivity_estimator=coercivity_estimator)
tic = perf_counter()
tr_mu, tr_minimization_data = coercive_rb_trust_region(pdeopt_reductor, parameter_space=parameter_space,
initial_guess=np.array(initial_guess))
toc = perf_counter()
tr_minimization_data['time'] = toc - tic
tr_output = fom.output(tr_mu)[0, 0]
Now, we only need \(4\) enrichments and end up with an approximation
error of about 1e-06 which is comparable to the result obtained from the
previous methods.
To conclude, we once again compare all methods that we have discussed in this notebook.
from pymordemos.trust_region import report as tr_report
reference_fun = fom_objective_functional(reference_mu)
print('FOM with finite differences')
report(fom_result, reference_minimization_data, reference_mu)
print('\nFOM with gradient')
report(opt_fom_result, opt_fom_minimization_data, reference_mu)
tr_report(tr_mu, tr_output, reference_mu, reference_fun, tr_minimization_data,
parameter_space.parameters.parse, descriptor=' of optimization with adaptive ROM model and TR method')
FOM with finite differences
succeeded!
mu_min: {diffusion: [1.4246565699504339, 3.141592653589793]}
J(mu_min): 2.3917078761994834
absolute error w.r.t. reference solution: 8.74e-07
num iterations: 7
num function calls: 27
time: 1.26024 seconds
FOM with gradient
succeeded!
mu_min: {diffusion: [1.4246556963614574, 3.141592653589793]}
J(mu_min): 2.3917078762140713
absolute error w.r.t. reference solution: 0.00e+00
num iterations: 7
num function calls: 9
time: 1.28675 seconds
Report of optimization with adaptive ROM model and TR method:
mu_min: {diffusion: [1.4246656693463333, 3.141592653589793]}
J(mu_min): 2.3917078761289026
abs parameter error w.r.t. reference solution: 9.97e-06
abs output error w.r.t. reference solution: 8.52e-11
num iterations: 3
num fom evaluations: 7
num rom evaluations: 224
num enrichments: 4
total BFGS iterations: 18
num line search calls: 114
time: 0.91299 seconds
It is apparent that for this example no drastic changes occur when using the different methods. Importantly, the TR method is noticeably faster than the FOM-based methods. It has been shown in the references mentioned below in the conclusion that for problems of larger scale the speedup obtained by gradient-based methods and in particular the TR method is even more pronounced. Crucially, the number of necessary FOM evaluations in the trust-region method is smaller than for the other methods because we use the information in the local surrogates more efficiently.
Note: A more extensive showcase of the trust-region methods is implemented
in the respective demo trust_region.
Conclusion and some general words about MOR methods for optimization¶
In this tutorial we have seen how pyMOR can be used to speedup the optimizer for PDE-constrained optimization problems. The trust-region algorithm shown here is able to efficiently use local surrogate models to reduce the number of FOM evaluations required during optimization.
We have only covered a few approaches to combine model reduction with optimization. For faster and more robust optimization algorithms we refer to the textbooks CGT00 and NW06. For recent research on combining trust-region methods with model reduction for PDE-constrained optimization problems we refer to YM13, QGVW17 and KMSOV20, where for the latter a pyMOR implementation is available as supplementary material.
Download the code:
tutorial_optimization.md
tutorial_optimization.ipynb