Tutorial: Reducing an LTI system using balanced truncation¶
Run this tutorial
Click here to run this tutorial on mybinder.org:Here we briefly describe the balanced truncation method,
for asymptotically stable LTI systems with an invertible \(E\) matrix,
and demonstrate it on the heat equation example from
Tutorial: Linear time-invariant systems.
First, we import necessary packages, including
BTReductor.
import matplotlib.pyplot as plt
import numpy as np
import scipy.sparse as sps
from pymor.models.iosys import LTIModel
from pymor.reductors.bt import BTReductor
plt.rcParams['axes.grid'] = True
Then we build the matrices
k = 50
n = 2 * k + 1
E = sps.eye(n, format='lil')
E[0, 0] = E[-1, -1] = 0.5
E = E.tocsc()
d0 = n * [-2 * (n - 1)**2]
d1 = (n - 1) * [(n - 1)**2]
A = sps.diags([d1, d0, d1], [-1, 0, 1], format='lil')
A[0, 0] = A[-1, -1] = -n * (n - 1)
A = A.tocsc()
B = np.zeros((n, 2))
B[:, 0] = 1
B[0, 0] = B[-1, 0] = 0.5
B[0, 1] = n - 1
C = np.zeros((3, n))
C[0, 0] = C[1, k] = C[2, -1] = 1
and form the full-order model.
fom = LTIModel.from_matrices(A, B, C, E=E)
Balanced truncation¶
As the name suggests, the balanced truncation method consists of finding a balanced realization of the full-order LTI system and truncating it to obtain a reduced-order model.
The balancing part is based on the fact that a single LTI system has many realizations. For example, starting from a realization
another realization can be obtained by replacing \(x(t)\) with \(T \tilde{x}(t)\) or by pre-multiplying the differential equation with an invertible matrix. In particular, there exist invertible transformation matrices \(T, S \in \mathbb{R}^{n \times n}\) such that the realization with \(\tilde{E} = S^{\operatorname{T}} E T = I\), \(\tilde{A} = S^{\operatorname{T}} A T\), \(\tilde{B} = S^{\operatorname{T}} B\), \(\tilde{C} = C T\) has Gramians \(\tilde{P}\) and \(\tilde{Q}\) satisfying \(\tilde{P} = \tilde{Q} = \Sigma = \operatorname{diag}(\sigma_i)\), where \(\sigma_i\) are the Hankel singular values (see Tutorial: Linear time-invariant systems for more details). Such a realization is called balanced.
The truncation part is based on the controllability and observability energies. The controllability energy \(E_c(x_0)\) is the minimum energy (squared \(\mathcal{L}_2\) norm of the input) necessary to steer the system from the zero state to \(x_0\). The observability energy \(E_o(x_0)\) is the energy of the output (squared \(\mathcal{L}_2\) norm of the output) for a system starting at the state \(x_0\) and with zero input. It can be shown for the balanced realization (and same for any other realization) that, if \(\tilde{P}\) is invertible, then
Therefore, states corresponding to small Hankel singular values are more difficult to reach (they have a large controllability energy) and are difficult to observe (they produce a small observability energy). In this sense, it is then reasonable to truncate these states. This can be achieved by taking as basis matrices \(V, W \in \mathbb{R}^{n \times r}\) the first \(r\) columns of \(T\) and \(S\), possibly after orthonormalization, giving a reduced-order model
with \(\hat{E} = W^{\operatorname{T}} E V\), \(\hat{A} = W^{\operatorname{T}} A V\), \(\hat{B} = W^{\operatorname{T}} B\), \(\hat{C} = C V\).
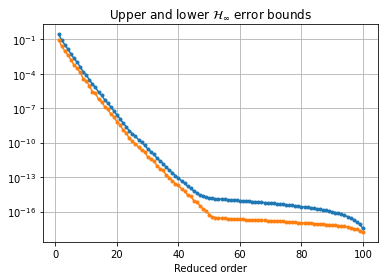
It is known that the reduced-order model is asymptotically stable if \(\sigma_r > \sigma_{r + 1}\). Furthermore, it satisfies the \(\mathcal{H}_\infty\) error bound
Note that any reduced-order model (not only from balanced truncation) satisfies the lower bound
Balanced truncation in pyMOR¶
To run balanced truncation in pyMOR, we first need the reductor object
bt = BTReductor(fom)
Calling its reduce method runs the
balanced truncation algorithm. This reductor additionally has an error_bounds
method which can compute the a priori \(\mathcal{H}_\infty\) error bounds
based on the Hankel singular values:
error_bounds = bt.error_bounds()
hsv = fom.hsv()
fig, ax = plt.subplots()
ax.semilogy(range(1, len(error_bounds) + 1), error_bounds, '.-')
ax.semilogy(range(1, len(hsv)), hsv[1:], '.-')
ax.set_xlabel('Reduced order')
_ = ax.set_title(r'Upper and lower $\mathcal{H}_\infty$ error bounds')
To get a reduced-order model of order 10, we call the reduce method with the
appropriate argument:
rom = bt.reduce(10)
Instead, or in addition, a tolerance for the \(\mathcal{H}_\infty\) error
can be specified, as well as the projection algorithm (by default, the
balancing-free square root method is used).
The used Petrov-Galerkin bases are stored in bt.V and bt.W.
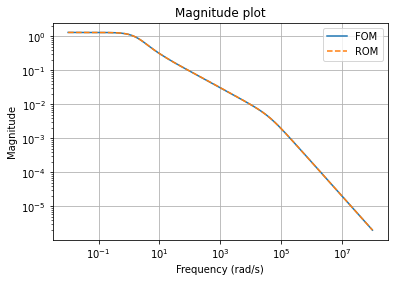
We can compare the magnitude plots between the full-order and reduced-order models
w = np.logspace(-2, 8, 300)
fig, ax = plt.subplots()
fom.mag_plot(w, ax=ax, label='FOM')
rom.mag_plot(w, ax=ax, linestyle='--', label='ROM')
_ = ax.legend()
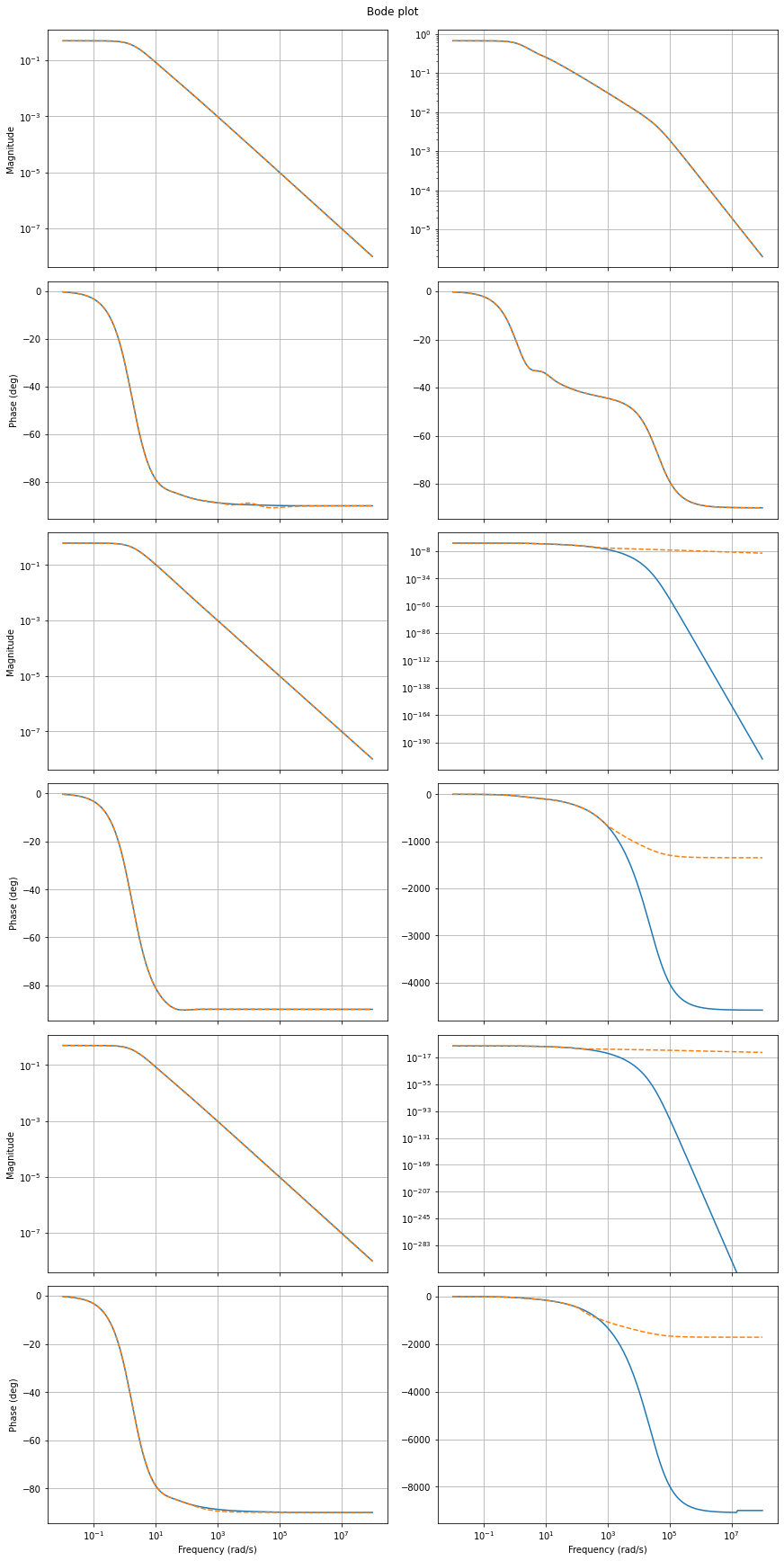
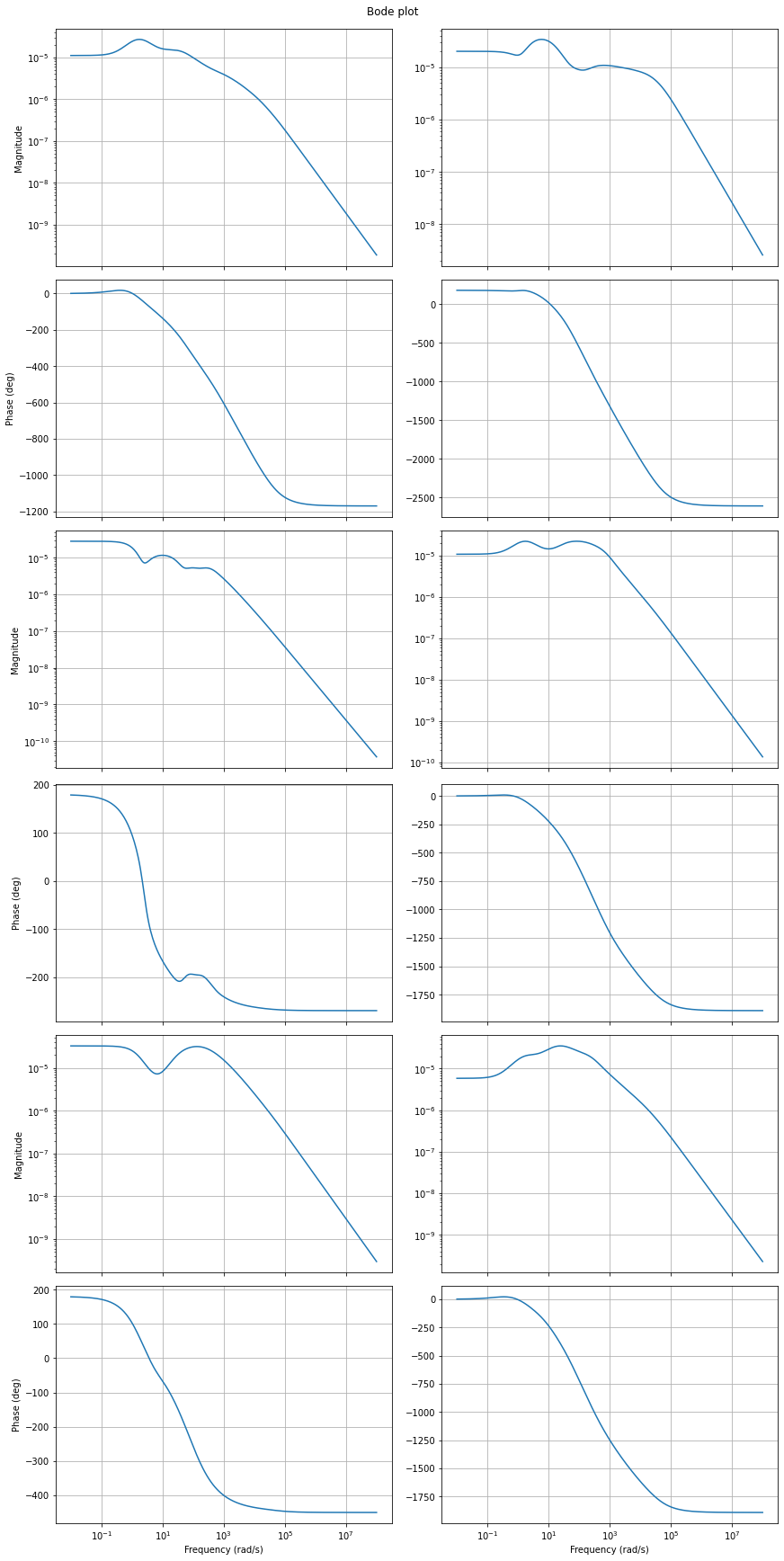
as well as Bode plots
fig, axs = plt.subplots(6, 2, figsize=(12, 24), sharex=True, constrained_layout=True)
fom.bode_plot(w, ax=axs)
_ = rom.bode_plot(w, ax=axs, linestyle='--')
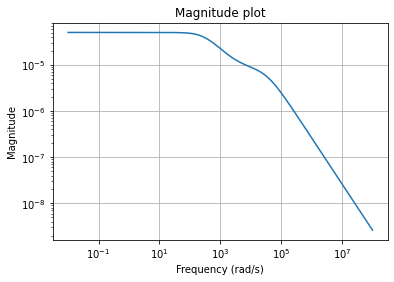
Also, we can plot the magnitude plot of the error system, which is again an LTI system.
err = fom - rom
_ = err.mag_plot(w)
and its Bode plot
_ = err.bode_plot(w)
Finally, we can compute the relative errors in different system norms.
print(f'Relative Hinf error: {err.hinf_norm() / fom.hinf_norm():.3e}')
print(f'Relative H2 error: {err.h2_norm() / fom.h2_norm():.3e}')
print(f'Relative Hankel error: {err.hankel_norm() / fom.hankel_norm():.3e}')
Relative Hinf error: 3.702e-05
Relative H2 error: 6.399e-04
Relative Hankel error: 7.629e-05
Download the code:
tutorial_bt.py,
tutorial_bt.ipynb.